
Electromagnetic tracking of flexible roboticcatheter enables “assisted navigation” and brings automation to endovascularnavigation in an ex-vivo study
Adeline Schwein, MD1, Ben Kramer, MS2, Ponraj Chinnadurai, MBBS, MMST3, Neha Virmani4, Sean Walker, PhD4, Marcia O'Malley, PhD2, Alan B. Lumsden, MD1, Jean Bismuth, MD1.
1Houston Methodist Hospital, Houston, TX, USA, 2Department of Mechanical Engineering, Rice University, Houston, TX, USA, 3Siemens Medical Solution USA Inc, Hoffman Estates Estates, IL, USA, 4Hansen Medical Inc., Mountain View, CA, USA.
OBJECTIVES: The combination of flexible robotics with electromagnetic (EM) tracking is a new concept in endovascular navigation. 3D catheter control with 3D EM navigation has shown significant reduction of fluoroscopy time and improvement of catheter motion quality in a pilot study. The aim of our current work was to expound on previous results and expand the value of EM with a new feature allowing automatic catheterization of a predefined vessel. METHODS: Eighteen users navigated in an aortic aneurysm phantom using an EM guidewire and a modified 9Fr robotic catheter with incorporated EM sensors. All users cannulated the left renal artery and a gate angled towards the aneurysmal posterior wall, using 4 visualization modes (Figure 1): (1) Standard fluoroscopy (2) 2D fluoroscopy showing real-time virtual catheter localization and orientation from EM tracking. (3) 2D fluoroscopy with an incorporated “assisted navigation” feature allowing the user to define the target vessel in two fluoroscopic views; the robotic catheter then orients itself automatically towards the target and the user only needs to advance the guidewire following this optimized predefined path. (4) Virtual 3D representation of the phantom showing virtual catheter orientation Standard fluoroscopy was always available; cannulation and fluoroscopy times were recorded. The number of submovements of the catheter’s trajectory was calculated using the 3D coordinates of the tip sensor to assess the smoothness of the catheter motion. A t-test was used to compare standard fluoroscopy mode to the use of EM tracking. RESULTS: For both cannulation tasks, EM tracking significantly reduced the mean fluoroscopy time (p<0.001) and the number of submovements (p<0.02). For the posterior gate, the mean cannulation time was also significantly reduced when using EM modes (p<0.001). Mode 3 showed further cannulation time shortening for the posterior gate catheterization (p=0.002) and kinematic metric improvement for the left renal artery cannulation (p=0.021). CONCLUSIONS: The results of this larger study confirm the value of combining 3D control and 3D navigation to improve safety and efficiency of endovascular procedures. The “assisted navigation” feature turns the robotic master/slave concept into real automation and shows promising results in reducing procedure time and improving catheter motion quality. 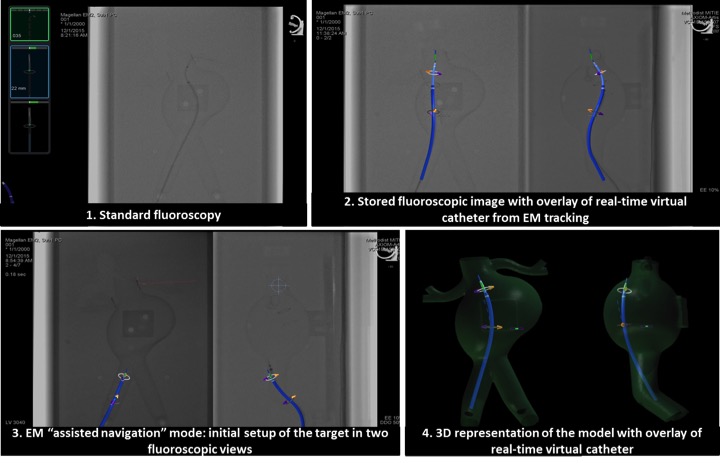
Back to 2017 Program



